意外なところから、当ブログのファンの要望が来ましてw 慌てて投稿ってのもあったりして。
てことで、まずは今日の様子。

こーんな感じの生物室と、

こーんな感じの物理室でした。
って、これじゃわかんないですよね。
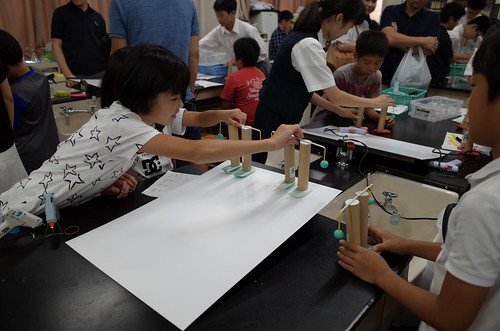
こんなかんじ。
名前がわかんなくて、いろいろとネットを徘徊しているうちに、「受動歩行」という名前で呼ばれているということはわかりました。
ただ、受動歩行というと大学のラボとかで膝関節などもつくって、きちっとした形で作成されているものを指すとは思いますけどね。
「なんか、モーターとか電池とか使ってないけど、坂道をトコトコと歩くロボット」
みたいな呼び方をしてました。(長っ!)
もしくは、「位置エネルギー歩行ロボット」なんて。
まぁ、名前は何でもいいんですが、とりあえず今日は、というか今日の当日までに結構な高い確率でちゃんとてくてく歩く状態までの完成度に持ってこれたことがなによりでしたね。
いやマジで。
まぁ、ほぼほぼ毎回、「あーダメかも。これ絶対当日までにうまくいく気がしない」みたいなことに陥って、そこからなんとか最後に形にするという感じなんですけどね。
今回も、一番始めにつくったプロトタイプがいきなりてくてく歩いてくれて、
「お! これ、行けんじゃね? なんだかわかんないけど成功しそう!」
とか思ってたんだけど、念のため、二個目をつくってみたら、お約束どおり動かない…とか。
でもって、3個目をつくって、4個目をつくって・・・って結局何個つくったかわからなくなるくらいつくったけど、ほとんど動かなくて。みたいな。
つーことで、色んな人にお知恵をいただきましたよ〜。
先生から、OBから、部員からも、み~んなに見せて、「ほとんど動かん。これだけ動く。理由がわからん。あとよろしく」
みたいな。
で、ほんっとに、皆様のおかげさまで、原理もほぼほぼ理解し、きれいに動くロボットが完成したわけですわ。
(後ろで唸っている機械音は、部員が筒をカットをしている作業音ですね)
ちなみに、これ、足の部分が3Dプリンターでプリントアウトしているんですよ。
完成形になったのが10日前。
当日の参加者はマックスで120名。
部員はだいたい30名。
失敗なども考慮して予備を20〜30個。
はい。足し算と割り算ですね。
ちなみに、3Dプリンターで5人分印刷するのに12時間ちょっとかかります。
もうね。自分で自分の首を絞めてましたよ。アフォかと。計算できてなかったですよ。
はい。ということで、大変前置きが長くなりましたが、今日、このロボットの原理や調整をするときの理屈をほとんど説明できなかったんですね。
なので、どのくらいの人がこのブログを閲覧するかって全くわからないのですが、いちおうここに掲載しておこうと考えました。
・・・考えました。
近いうちに文章をきちんとまとめてアップしますね。今日は報告だけで許してください。
でわでわ。